线性神经网络
从经典算法————线性神经网络开始,介绍神经网络的基础知识
经典统计学习技术中的线性回归和softmax回归可以视为线性神经网络
线性回归
基本元素
**回归(regression)**是能为一个或多个自变量与因变量之间关系建模的一类方法
在机器学习领域中的大多数任务通常都与**预测(prediction)**有关,但不是所有的预测都是回归问题
线性回归基于两个简单假设
- 自变量$\mathbf{x}$和因变量$y$之间的关系是线性的,即$y$可以表示为$\mathbf{x}$中元素的加权和,通常允许包含观测值的一些噪声
- 任何噪声都比较正常,如噪声遵循正态分布
为了开发一个能预测房价的模型,需要收集一个真实的数据集,包括房屋的销售价格、面积和房龄,该数据集称为训练集(training set),每行数据称为样本(sample)
把试图预测的目标(房屋价格)称为标签(label)或目标(target),预测所依据的自变量(面积和房龄)称为特征(feature)
通常使用$n$来表示数据集中的样本数,对索引为$i$的样本,其输入表示为$\mathbf{x}^{(i)} = [x_1^{(i)}, x_2^{(i)}]^\top$,其对应的标签是$y^{(i)}$
线性模型
根据线性假设,价格表示为
$$
\mathrm{price} = w_{\mathrm{area}} \cdot \mathrm{area} + w_{\mathrm{age}} \cdot \mathrm{age} + b.
$$
$w_{\mathrm{area}}$和$w_{\mathrm{age}}$称为权重,权重决定了每个特征对预测值的影响,$b$称为偏置(bias)
这个式子是输入特征的仿射变换(affine transformation),即通过加权和对特征进行线性变换(linear transformation),并通过偏置项来进行平移(translation)
给定一个数据集,目标是寻找模型的权重$\mathbf{w}$和偏置$b$
输入包含$d$个特征时,将预测结果$\hat{y}$表示为
$$
\hat{y} = w_1 x_1 + … + w_d x_d + b.
$$
将所有特征放到向量$\mathbf{x} \in \mathbb{R}^d$,并将所有权重放到向量$\mathbf{w} \in \mathbb{R}^d$中,可以用点积形式来简洁地表达模型
$$
\hat{y} = \mathbf{w}^\top \mathbf{x} + b.
$$
用矩阵$\mathbf{X} \in \mathbb{R}^{n \times d}$可以很方便地引用整个数据集的$n$个样本,每一行是一个样本,每一列是一种特征
预测值$\hat{\mathbf{y}} \in \mathbb{R}^n$通过矩阵-向量乘法表示为
$$
\color{purple} {\hat{\mathbf{y}}} = \mathbf{X} \mathbf{w} + b
$$
无论使用什么手段来观察特征$\mathbf{X}$和标签$\mathbf{y}$都可能会出现少量的观测误差
因此即使确信特征与标签的潜在关系是线性的,也会加入一个噪声项来考虑观测误差带来的影响
在开始寻找最好的模型参数$\mathbf{w}$和$b$之前,需要确定两项
- 模型质量的度量方式
- 能够更新模型以提高模型预测质量的方法
损失函数
**损失函数(loss function)**能够量化目标的实际值与预测值之间的差距,通常选择非负数作为损失,且数值越小表示损失越小,完美预测时的损失为0
回归问题中最常用的损失函数是均方误差函数,样本$i$的预测值为$\hat{y}^{(i)}$,其真实标签为$y^{(i)}$时,平方误差表示为
$$
l^{(i)}(\mathbf{w}, b) = \frac{1}{2} \left(\hat{y}^{(i)} - y^{(i)}\right)^2.
$$
常数1/2不会带来本质的差别,但这样方便后续求导
计算在训练集$n$个样本上的均方误差
$$
L(\mathbf{w}, b) =\frac{1}{n}\sum_{i=1}^n l^{(i)}(\mathbf{w}, b) =\frac{1}{n} \sum_{i=1}^n \frac{1}{2}\left(\mathbf{w}^\top \mathbf{x}^{(i)} + b - y^{(i)}\right)^2=\frac{1}{n}\mid\mid \mathbf y-\mathbf X \mathbf w\mid\mid^2
$$
解析解
线性回归的解可以用一个公式简单地表达出来,这类解叫作解析解(analytical solution)
可以直接通过代数公式求出最优解,不需要迭代算法(如梯度下降)
将损失关于$\mathbf{w}$的导数设为0,得到解析解
计算过程
先把损失函数展开
$$
L(\mathbf w,b)=(\mathbf y-\mathbf X \mathbf w)^{\top}(\mathbf y-\mathbf X \mathbf w)
$$对$\mathbf w$求导,并令导数为零(最小值点的一阶导数为零)
$$
\frac{\partial L}{\partial \mathbf w}=-2 \mathbf X^{\top}(\mathbf y-\mathbf X \mathbf w)=0
$$移项得
$$
\mathbf X^{\top} \mathbf X \mathbf w=\mathbf X^{\top} \mathbf y
$$当$\mathbf X^{\top} \mathbf X $ 可逆时,求得解析解
$$
\mathbf{w}^* = (\mathbf X^\top \mathbf X)^{-1}\mathbf X^\top \mathbf{y}.
$$
但并不是所有的问题都存在解析解
解析解对问题的限制很严格,导致它无法广泛应用在深度学习里
随机梯度下降SGD
随机梯度下降SGD几乎可以优化所有深度学习模型,它通过在损失函数递减的方向上更新参数来降低误差
最简单的用法是计算损失函数关于模型参数的导数,但计算量可能很大,通常会随机抽取一小批样本,这种变体叫做小批量随机梯度下降(minibatch stochastic gradient descent)
在每次迭代中,首先随机抽样一个小批量,由批量大小(batch size)为$\mid \mathcal{B}\mid $个的训练样本组成的,计算平均损失关于模型参数的导数,将梯度乘以学习率$\eta$(learning rate),并从当前参数的值中减掉
$$
(\mathbf{w},b) \leftarrow (\mathbf{w},b) - \frac{\eta}{|\mathcal{B}|} \sum_{i \in \mathcal{B}} \partial_{(\mathbf{w},b)} l^{(i)}(\mathbf{w},b).
$$
使得参数沿着让误差变小的方向移动
算法的步骤如下:
- 初始化模型参数的值,如随机初始化
- 从数据集中随机抽取小批量样本且在负梯度的方向上更新参数,并不断迭代
对于均方损失和仿射变换可以写成
$$
\begin{split}\begin{aligned} \mathbf{w} &\leftarrow \mathbf{w} - \frac{\eta}{|\mathcal{B}|} \sum_{i \in \mathcal{B}} \partial_{\mathbf{w}} l^{(i)}(\mathbf{w}, b) = \mathbf{w} - \frac{\eta}{|\mathcal{B}|} \sum_{i \in \mathcal{B}} \mathbf{x}^{(i)} \left(\mathbf{w}^\top \mathbf{x}^{(i)} + b - y^{(i)}\right),\\
b &\leftarrow b - \frac{\eta}{|\mathcal{B}|} \sum_{i \in \mathcal{B}} \partial_b l^{(i)}(\mathbf{w}, b) = b - \frac{\eta}{|\mathcal{B}|} \sum_{i \in \mathcal{B}} \left(\mathbf{w}^\top \mathbf{x}^{(i)} + b - y^{(i)}\right). \end{aligned}\end{split}
$$
批量大小和学习率的值通常是手动预先指定,而不是通过模型训练得到的
可以调整但不在训练过程中更新的参数称为超参数(hyperparameter),调参是选择超参数的过程
超参数通常是根据训练迭代结果来调整的,而训练迭代结果是在独立的**验证数据集(validation dataset)**上评估得到的
线性回归是在整个域中只有一个最小值的学习问题,但是对像深度神经网络这样复杂的模型来说,损失平面上通常包含多个最小值。更难做到的是找到一组参数,这组参数能够在从未见过的数据上实现较低的损失,这一挑战被称为泛化(generalization)
矢量化加速
训练模型时,经常希望能够同时处理整个小批量的样本,为了实现这一点,需要对计算进行矢量化, 从而利用线性代数库,而不是在Python中编写开销高昂的for循环
因为频繁对运行时间进行基准测试,需要定义一个计时器类
1 | import time |
现在可以对工作负载进行基准测试
使用for循环,每次执行一位的加法
1 | n = 10000 |
使用重载的+运算符来计算按元素的和
1 | timer.start() |
矢量化代码通常会带来数量级的加速
正态分布与平方损失
正态分布(normal distribution)也称为高斯分布(Gaussian distribution),和线性回归之间的关系很密切
若随机变量$x$具有均值$\mu$和方差$\sigma^2$,其正态分布概率密度函数如下
$$
p(x) = \frac{1}{\sqrt{2 \pi \sigma^2}} \exp\left(-\frac{1}{2 \sigma^2} (x - \mu)^2\right).
$$
1 | def normal(x, mu, sigma): |
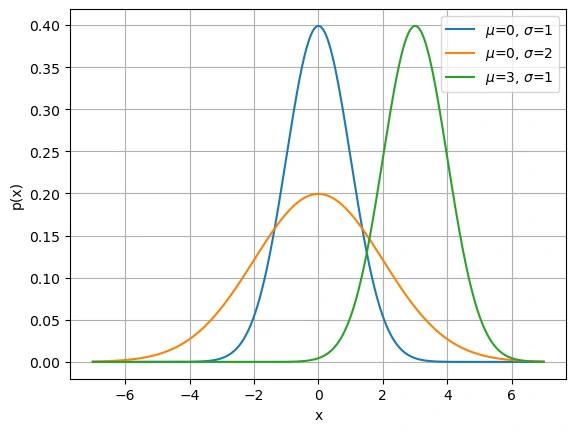
改变均值会产生沿轴的偏移,增加方差将会分散分布、降低其峰值
假设了观测中包含噪声,其中噪声服从正态分布$\epsilon \sim \mathcal{N}(0, \sigma^2)$
$$
y = \mathbf{w}^\top \mathbf{x} + b + \epsilon
$$
通过给定的$\mathbf{x}$观测到特定$y$的似然(likelihood)
$$
P(y \mid \mathbf{x}) = \frac{1}{\sqrt{2 \pi \sigma^2}} \exp\left(-\frac{1}{2 \sigma^2} (y - \mathbf{w}^\top \mathbf{x} - b)^2\right).
$$
根据极大似然估计法(MLE),参数$\mathbf{w}$和$b$的最优值是使整个数据集似然最大的值
$$
P(\mathbf y \mid \mathbf X) = \prod_{i=1}^{n} p(y^{(i)}|\mathbf{x}^{(i)}).
$$
由于历史原因,优化通常是说最小化而不是最大化,所以改为最小化负对数似然$-\log P(\mathbf y \mid \mathbf X)$
$$
-\log P(\mathbf y \mid \mathbf X) = \sum_{i=1}^n \frac{1}{2} \log(2 \pi \sigma^2) + \frac{1}{2 \sigma^2} \left(y^{(i)} - \mathbf{w}^\top \mathbf{x}^{(i)} - b\right)^2
$$
第一项与$\mathbf{w},b$无关;第二项除了系数,其余部分与平方方误差相同,所以在高斯噪声的假设下,最小化平方误差等价于对线性模型的极大似然估计
从线性回归到深度网络
将线性回归模型描述为一个神经网络

该图只显示连接模式,即只显示每个输入如何连接到输出,隐去了权重和偏置的值
由于模型重点在发生计算的地方,所以通常在计算层数时不考虑输入层,图中神经网络的层数为1
可以将线性回归模型视为仅由单个人工神经元组成的神经网络,或称为单层神经网络
对于线性回归,每个输入都与每个输出相连,将这种变换(图中输出层)称为全连接层(fully-connected layer)
练习题
假设有一些数据$x_1, \ldots, x_n \in \mathbb{R}$,目标是找到一个常数$b$,使最小化$\sum_i (x_i - b)^2$
- 找到最优值$b$的解析解
- 这个问题及其解与正态分布有什么关系
$$
\begin{aligned}
&f^{\prime}(b)=\sum_{i=1}^n 2\left(b-x_i\right)=2\left(n b-\sum_i x_i\right)=0 \Rightarrow b^*=\frac{1}{n} \sum_{i=1}^n x_i=\bar{x} .
\end{aligned}
$$二阶导$f^{\prime \prime}(b)=2 n>0$,因此这是唯一全局最小值
所以最小二乘下,最优常数就是样本均值
若数据独立同分布于$\mathcal{N}(\mu , \sigma^2)$,极大化似然就等价于最小化平方和,因此MLE的$\mu$就是$\bar x$,这解释了为什么“最小二乘”天然匹配“高斯噪声”
如果把损失从$L_2$改为$L_1$范数,最优常数会变成中位数
用矩阵和向量表示法写出优化问题
带上偏置$b$的写法
$$
\tilde {\mathbf X} = [\mathbf X \quad \mathbf 1] \in \mathbb{R}^{n\times (d+1)},\tilde {\mathbf w} = [\mathbf w^\top\quad b]^\top
$$损失对$w$的梯度
$$
\nabla_{\mathbf w} L=-2 \mathbf X^{\top}(\mathbf y-\mathbf X \mathbf w) \rightarrow \nabla^2_{\mathbf w} L = 2\mathbf X^{\top} \mathbf X
$$
二阶导数大于等于0什么时候使用随机梯度下降更好?这种方法何时会失效?
样本数量大,特征维度也大时使用随机梯度下降更好,深度神经网络训练几乎都是用 SGD 及其变种
学习率/调度不当,损失函数过于崎岖时将失效
假定控制附加噪声的噪声模型是指数分布$p(\epsilon) = \frac{1}{2} \exp(-|\epsilon|)$
写出模型$-\log P(\mathbf y \mid \mathbf X)$下数据的负对数似然
$$
P(y \mid \mathbf{x}) = \frac{1}{2}\exp (-\mid y - \mathbf{w}^\top \mathbf{x} - b \mid)
$$
负对数似然
$$
-\log P(\mathbf y \mid \mathbf X) = n\log2 + \sum_{i=1}^n\mid y - \mathbf{w}^\top \mathbf{x} - b \mid
$$
常数项忽略以后等价于最小化 L1 回归损失提出一种随机梯度下降算法来解决这个问题。哪里可能出错?
L1 在 0 处有“拐点”,$\operatorname{sgn}(r)$会在正负之间反复切换,如果学习率不衰减就会持续震荡,导致无法收敛
线性回归的底层实现
虽然深度学习框架几乎可以自动化地进行所有这些工作,但从零开始实现可以确保知道自己在做什么
生成数据集
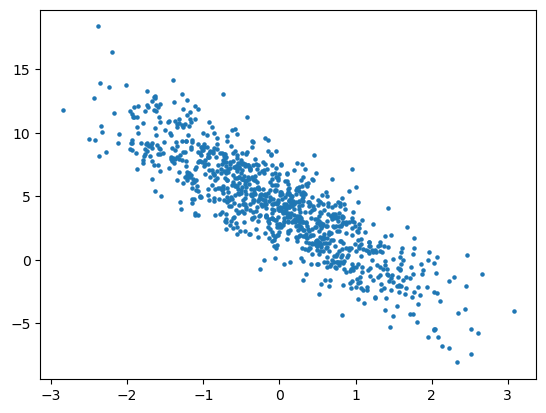
将根据带有噪声的线性模型构造一个数据集,合成数据集是一个矩阵$\mathbf{X}\in \mathbb{R}^{1000 \times 2}$
使用线性模型参数$\mathbf{w} = [2, -3.4]^\top$,$b = 4.2$以及噪声$\varepsilon $生成数据集及其标签
$\epsilon$可以视为模型预测和标签时的潜在观测误差,假设服从均值为0的正态分布,标准差为0.01
1 | def synthetic_data(w, b, num_examples): #@save |
通过生成第二个特征features[:, 1]和labels的散点图,可以直观观察到两者之间的线性关系
1 | # 需要从张量换为numpy |
读取数据集
训练模型时要对数据集进行遍历,每次抽取一小批量样本,并使用它们来更新模型
有必要定义一个函数,该函数能打乱数据集中的样本并以小批量方式获取数据
定义一个data_iter函数,该函数接收批量大小、特征矩阵和标签向量作为输入,生成大小为batch_size的小批量,每个小批量包含一组特征和标签
1 | import random |
利用GPU并行运算的优势,处理合理大小的“小批量”
每个样本都可以并行地进行模型计算,且每个样本损失函数的梯度也可以被并行计算
1 | batch_size = 10 |
当运行迭代时,会连续地获得不同的小批量,直至遍历完整个数据集
但这种迭代的执行效率很低,因为需要把所有数据读入,并且执行大量的随机内存访问
在深度学习框架中实现的内置迭代器效率要高得多,它可以处理存储在文件中的数据和数据流提供的数据
初始化模型参数
通过从均值为0、标准差为0.01的正态分布中采样随机数来初始化权重,并将偏置初始化为0
1 | w = torch.normal(0, 0.01, size=(2,1), requires_grad=True) |
之后更新这些参数,直到这些参数足够拟合数据,每次更新都需要计算损失函数关于模型参数的梯度,有了这个梯度,就可以向减小损失的方向更新每个参数
根据之前引入的自动微分来计算梯度(requires_grad=True)
定义模型
将模型的输入和参数同模型的输出关联起来
1 | def linreg(X, w, b): #@save |
定义损失函数
定义损失函数是重中之重,这里使用之前描述的平方损失函数
需要将真实值y的形状转换为和预测值y_hat的形状相同
1 | def squared_loss(y_hat, y): #@save |
定义优化算法
线性回归有解析解,但其实大部分模型是没有解析解的,这里利用小批量梯度下降
使用从数据集中随机抽取的一个小批量,然后根据参数计算损失的梯度,朝着减少损失的方向更新参数,该函数接受模型参数集合、学习速率和批量大小作为输入
- 每一步更新的大小由学习速率
lr决定 - 计算的损失是一个批量样本的总和,用批量大小(
batch_size)来规范化步长
1 | def sgd(params, lr, batch_size): #@save |
训练
已经准备好了模型训练所有需要的要素,可以实现主要的训练过程部分了
将执行以下循环:
- 初始化参数
- 重复以下训练,直到完成
- 计算梯度$\mathbf{g} \leftarrow \partial_{(\mathbf{w},b)} \frac{1}{|\mathcal{B}|} \sum_{i \in \mathcal{B}} l(\mathbf{x}^{(i)}, y^{(i)}, \mathbf{w}, b)$
- 更新参数$(\mathbf{w}, b) \leftarrow (\mathbf{w}, b) - \eta \mathbf{g}$
在每个迭代周期(epoch)中,使用data_iter函数遍历整个数据集,并将训练数据集中所有样本都使用一次(假设样本数能够被批量大小整除)
在该例子中迭代周期个数num_epochs和学习率lr都是超参数,分别设为3和0.03
设置超参数很棘手,需要通过反复试验进行调整
1 | lr = 0.03 # 学习率 |
输出
1 | epoch 1, loss 0.025137 |
对比之前设置的真实参数
1 | print(f'w的估计误差: {true_w - w.reshape(true_w.shape)}') |
1 | w的估计误差: tensor([1.0513e-03, 6.3181e-05], grad_fn=<SubBackward0>) |
在机器学习中,通常不太关心恢复真正的参数,而更关心如何高度准确预测参数
即使是在复杂的优化问题上,随机梯度下降通常也能找到非常好的解,因为在深度网络中存在许多参数组合能够实现高度精确的预测
练习题
如果将权重初始化为零,会发生什么,算法仍然有效吗?
像线性回归这种问题,因为损失函数是凸函数,梯度在所有方向上都是对称的,不管初始点在哪,梯度下降都会沿着唯一方向走到全局最优
但在神经网络这种多层模型里就不行了,如果权重都初始化为0,那么所有的神经元都一样,梯度也完全一样,就会出现对称性问题,陷入死局
模型类型 全零初始化后果 原因 线性回归 可行 损失函数是凸的,无对称问题 逻辑回归 可行 一层模型,不存在多通道对称性 神经网络(多层) 失败 神经元对称、梯度相同、学习停滞 计算二阶导数时可能会遇到什么问题?这些问题可以如何解决?
只在第一次求导时指定
create_graph=True,PyTorch 才会保留梯度计算图,从而允许继续求导1
2
3
4
5
6
7
8x = torch.tensor(4.0, requires_grad=True)
y = x ** 3
y.backward(create_graph=True) # 保留梯度计算图
print(x.grad) # 输出48 3x^2=48符合
grad_x = x.grad.clone() # 不能"=",只是赋地址,grad.zero_()清掉了
x.grad.zero_() # 避免梯度累加,因为我只看二阶导梯度
grad_x.backward() # 再次反向传播
print(x.grad)为什么在
squared_loss函数中需要使用reshape函数?y_hat的形状可能是(batch_size, 1)或(batch_size,)y的形状常常是(batch_size,)如果直接计算可能会出现广播机制
1
2y_hat.shape = (3, 1)
y.shape = (3,)广播后变为(3,3)的矩阵计算,这肯定是不对的
显式地让
y的形状与y_hat完全一致,确保预测值和真实值形状一致,从而进行逐元素平方损失计算尝试使用不同的学习率,观察损失函数值下降的快慢
学习率越大,损失函数下降越快
如果样本个数不能被批量大小整除,
data_iter函数的行为会有什么变化?情况 优点 缺点 保留不满批次 所有样本都用上 最后一批大小不一致,梯度波动略大 丢弃不满批次 批次形状一致,利于并行 一部分样本没被训练
线性回归的简洁实现
由于数据迭代器、损失函数、优化器和神经网络层很常用,现代深度学习库已经实现了这些组件
生成数据集一般没有特殊的封装函数,毕竟大部分情况下数据都是已经获取好,读入即可
读取数据集
可以调用PyTorch框架中现有的API来读取数据,将features和labels作为API的参数传递
1 | from torch.utils import data |
定义模型
对于标准深度学习模型,可以使用框架的预定义好的层,只需关注使用哪些层来构造模型,而不必关注层的实现细节
首先定义一个模型变量net,它是一个Sequential类的实例
Sequential类将多个层串联在一起,当给定输入数据时,Sequential实例将数据传入到第一层,然后将第一层的输出作为第二层的输入,以此类推
当前单层连接所有输入,所以为全连接层
在PyTorch中,全连接层在Linear类中定义,将两个参数传递到nn.Linear中
参数1指定输入特征形状,即2
参数2指定输出特征形状,输出特征形状为单个标量,因此为1
1 | from torch import nn |
初始化模型参数
在使用net之前,需要初始化模型参数,如在线性回归模型中的权重和偏置
深度学习框架通常有预定义的方法来初始化参数
在这里指定每个权重参数应该从均值为0、标准差为0.01的正态分布中随机采样,偏置参数将初始化为零
通过net[0]选择网络中的第一个图层,然后使用weight.data和bias.data方法访问参数,还可以使用替换方法normal_和fill_来重写参数值
1 | net[0].weight.data.normal_(0, 0.01) |
定义损失函数
计算均方损失使用的是MSELoss类,也称为均方$L_2$范数
1 | loss = nn.MSELoss(reduction='mean') |
参数reduction
- 默认
mean,对所有元素的损失取平均值,最常用,标准化损失 $ \frac{1}{n} \sum_{i}\left(x_{i}-y_{i}\right)^{2}$ none,不进行任何聚合,返回与输入相同形状的逐元素损失 $(x_{i}-y_{i})^{2}$sum,对所有元素的损失求和,希望损失值与样本规模成比例,常出现于最大似然 $\sum_{i}\left(x_{i}-y_{i}\right)^{2}$
定义优化算法
小批量随机梯度下降算法是一种优化神经网络的标准工具,PyTorch在optim模块中实现了该算法的许多变种
当实例化一个SGD实例时,要指定优化的参数(可通过net.parameters()从模型中获得)以及优化算法所需的超参数字典
小批量随机梯度下降只需要设置lr值,这里设置为0.03
1 | trainer = torch.optim.SGD(net.parameters(), lr=0.03) |
训练
通过深度学习框架的高级API来实现,只需要相对较少的代码
不必单独分配参数、不必定义损失函数,也不必手动实现小批量随机梯度下降
当有了所有的基本组件,训练过程代码与从零开始实现时所做的非常相似
对于每一个小批量,会进行以下步骤
- 通过调用
net(X)生成预测并计算损失l(前向传播) - 通过进行反向传播来计算梯度
- 通过调用优化器来更新模型参数
1 | num_epochs = 3 |
输出
1 | epoch 1, loss 0.000252 |
访问训练出的权重和偏置
1 | w = net[0].weight.data |
1 | w的估计误差: tensor([0.0014, 0.0002]) |
内置函数
所有损失函数都在 torch.nn 中实现为类
回归问题的损失函数:
| 损失函数 | 说明 | 默认公式 |
|---|---|---|
nn.MSELoss() |
均方误差(Mean Squared Error) | $\frac{1}{n}\sum(y - \hat{y})^2$ |
nn.L1Loss() |
平均绝对误差(Mean Absolute Error) | $\frac{1}{n}\sum\mid y- \hat y \mid $ |
nn.SmoothL1Loss() |
平滑版 L1,融合 L1 与 L2 优点 | 对小误差用平方 大误差用绝对值 |
nn.HuberLoss() |
类似 SmoothL1,可设阈值 δ 控制 | 兼顾稳健性与可导性 |
小结
- 在PyTorch中,
data模块提供了数据处理工具,nn模块定义了大量的神经网络层和常见损失函数 - 可以通过
_结尾的方法将参数替换,从而初始化参数
softmax回归的概念
分类这个词可描述两个有微妙差别的问题:
- 只对样本的“硬性”类别感兴趣,即属于哪个类别
- 希望得到“软性”类别,即得到属于每个类别的概率
这两者的界限往往很模糊,因为即使只关心硬类别,仍然使用软类别的模型
分类问题
从一个图像分类问题开始,假设每次输入是一个$2\times 2$的灰度图像,可以用一个标量表示每个像素值,每个图像对应四个特征$x_1, x_2, x_3, x_4$,假设每个图像属于类别“猫”“鸡”和“狗”中的一个
接下来要考虑如何表示标签,最直接的想法是选择$y \in {1, 2, 3}$来分别表示${\text{狗}, \text{猫}, \text{鸡}}$,这是在计算机上存储此类信息的有效方法,但这种方法需要类别间有一些自然顺序
但是一般的分类问题并不与类别之间的自然顺序有关,所以需要利用独热编码(one-hot encoding)
独热编码是一个向量,它的分量和类别一样多,类别对应的分量设置为1,其他所有分量设置为0
在例子中,标签$y$将是一个三维向量,其中$(1, 0, 0)$对应于“猫”、$(0, 1, 0)$对应于“鸡”、$(0, 0, 1)$对应于“狗”
$$
y \in {(1, 0, 0), (0, 1, 0), (0, 0, 1)}.
$$
网络架构
为了估计所有可能类别的条件概率,需要一个有多个输出的模型,每个类别对应一个输出
为了解决线性模型的分类问题,需要和输出一样多的仿射函数,每个输出对应于它自己的仿射函数
回到简单例子中,有4个特征和3个可能的输出类别,将需要12个标量来表示权重(带下标的$w$),3个标量来表示偏置(带下标的$b$)
为每个输入计算三个未规范化的预测
$$
\begin{split}\begin{aligned}
o_1 &= x_1 w_{11} + x_2 w_{12} + x_3 w_{13} + x_4 w_{14} + b_1,\\
o_2 &= x_1 w_{21} + x_2 w_{22} + x_3 w_{23} + x_4 w_{24} + b_2,\\
o_3 &= x_1 w_{31} + x_2 w_{32} + x_3 w_{33} + x_4 w_{34} + b_3.
\end{aligned}\end{split}
$$
和线性回归一样,softmax回归也是一个单层神经网络且输出层也是全连接层

为了更简洁地表达模型,仍然使用线性代数符号,通过向量形式表达为$\mathbf{o} = \mathbf{W} \mathbf{x} + \mathbf{b}$
权重在一个$3 \times 4$的矩阵中,对于给定数据样本的特征$\mathbf{x}$,输出是由权重与输入特征进行矩阵-向量乘法再加上偏置得到的
全连接层的参数开销
在深度学习中,全连接层无处不在,但是全连接层可能有很多可学习的参数
对于任何具有$d$个输入和$q$个输出的全连接层,参数开销为$\mathcal{O}(dq)$,但通过低秩分解将矩阵拆分,引入一个中间的低维隐空间,用较少的参数去近似原始映射
此时参数数量从$dq$下降为$dn+nq=O(\frac{dq}{n})$(当$n\ll d,q$时)
其中超参数$n$可以灵活指定,但是需要平衡参数节约和模型有效性
softmax运算
为了得到预测结果将设置一个阈值,如选择具有最大概率的标签
希望模型的输出$\hat{y}_j$可以视为属于类$j$的概率,然后选择具有最大输出值的类别$\operatorname*{argmax}_j y_j$作为预测
能否将未规范化的预测$o$直接视作我们感兴趣的输出呢?这肯定是不行的,将线性层的输出直接视为概率时存在一些问题:
- 没有限制输出总和为1
- 根据输入不同,输出可能为负值
这已经违反了概率基本公理
要将输出视为概率,必须保证在任何数据上的输出都是非负的且总和为1
此外,需要一个训练的目标函数,来激励模型精准地估计概率
比如在分类器输出0.5的所有样本中,希望这些样本是刚好有一半实际上属于预测的类别,这个属性叫做校准(calibration)
在选择模型理论基础上发明的softmax函数能够将未规范化的预测变换为非负数并且总和为1,同时让模型保持可导的性质
首先对每个未规范化的预测求幂(这样可以确保输出非负),再让每个求幂后的结果除以它们的总和
$$
\hat{\mathbf{y}} = \mathrm{softmax}(\mathbf{o})\quad \text{其中}\quad \hat{y}_j = \frac{\exp(o_j)}{\sum_k \exp(o_k)}
$$
这样$\hat{\mathbf{y}}$可以视为一个正确的概率分布
softmax运算不会改变未规范化的预测之间的大小次序,只会确定分配给每个类别的概率,所以仍然可以用下式来选择最有可能的类别
$$
\operatorname*{argmax}_j \hat y_j = \operatorname*{argmax}_j o_j.
$$
小批量样本的矢量化
假设读取了一个批量的样本$\mathbf{X}$,其中特征维度(输入数量)为$d$,批量大小为$n$,并假设在输出中有$q$个类别
那么小批量样本的特征为$\mathbf{X} \in \mathbb{R}^{n \times d}$,权重为$\mathbf{W} \in \mathbb{R}^{d \times q}$,偏置为$\mathbf{b} \in \mathbb{R}^{1\times q}$
softmax回归的矢量计算表达式为:
$$
\begin{split}\begin{aligned} \mathbf{O} &= \mathbf{X} \mathbf{W} + \mathbf{b}, \\ \hat{\mathbf{Y}} & = \mathrm{softmax}(\mathbf{O}). \end{aligned}\end{split}
$$
相对于一次处理一个样本,小批量样本的矢量化加快了$\mathbf{X},\mathbf{W}$的矩阵-向量乘法
由于$\mathbf{X}$中的每一行代表一个数据样本,那么softmax运算可以按行执行
这里的偏置依旧会触发广播机制,小批量的未规范化预测$\mathbf{O}$和输出概率$\hat{\mathbf{Y}}$都是形状为$n \times q$的矩阵
损失函数
需要一个损失函数来度量预测的效果,将使用最大似然估计,这与在线性回归中的方法相同
对数似然
softmax函数给出了一个向量$\hat{\mathbf{y}}$,可以将其视为“对给定任意输入$\mathbf{x}$的每个类的条件概率”
假设整个数据集${\mathbf{X}, \mathbf{Y}}$具有$n$个样本,其中索引$i$的样本由特征向量$\mathbf{x}^{(i)}$和独热标签向量$\mathbf{y}^{(i)}$组成
可以将估计值与实际值进行比较
$$
P(\mathbf{Y} \mid \mathbf{X}) = \prod_{i=1}^n P(\mathbf{y}^{(i)} \mid \mathbf{x}^{(i)}).
$$
根据最大似然估计,最大化$P(\mathbf{Y} \mid \mathbf{X})$相当于最小化负对数似然
$$
-\log P(\mathbf{Y} \mid \mathbf{X}) = \sum_{i=1}^n -\log P(\mathbf{y}^{(i)} \mid \mathbf{x}^{(i)})
= \sum_{i=1}^n l(\mathbf{y}^{(i)}, \hat{\mathbf{y}}^{(i)}),
$$
其中,对于任何标签$\mathbf{y}$和模型预测$\hat{\mathbf{y}}$,损失函数为
$$
l(\mathbf{y}, \hat{\mathbf{y}}) = - \sum_{j=1}^q y_j \log \hat{y}_j.
$$
通常被称为交叉熵损失(cross-entropy loss)
- 由于$\mathbf{y}$是一个长度为$q$的独热编码向量,所以除了一个项以外的所有项$j$都消失了
- 由于所有$\hat{y}_j$都是预测的概率,所以对数永远不会大于0
如果正确预测实际标签,即$P(\mathbf{y} \mid \mathbf{x})=1$,则损失函数不能进一步最小化,但是基本不会出现
因为数据集中可能存在标签噪声(比如某些样本可能被误标)
softmax及其导数
利用softmax的定义得到
$$
\begin{split}\begin{aligned}
l(\mathbf{y}, \hat{\mathbf{y}}) &= - \sum_{j=1}^q y_j \log \frac{\exp(o_j)}{\sum_{k=1}^q \exp(o_k)} \\
&= \sum_{j=1}^q y_j \log \sum_{k=1}^q \exp(o_k) - \sum_{j=1}^q y_j o_j\\
&= \log \sum_{k=1}^q \exp(o_k) - \sum_{j=1}^q y_j o_j.
\end{aligned}\end{split}
$$
考虑相对于任何未规范化的预测$o_j$的导数得到
$$
\partial_{o_j} l(\mathbf{y}, \hat{\mathbf{y}}) = \frac{\exp(o_j)}{\sum_{k=1}^q \exp(o_k)} - y_j = \mathrm{softmax}(\mathbf{o})_j - y_j = \hat y_j-y_j
$$
发现导数是softmax模型分配的概率与实际发生的情况(由独热标签向量表示)之间的差异
这与之前在回归中看到的非常相似,其中梯度是观测值与预估值之间的差异
这不是巧合,在任何指数族分布模型中,对数似然的梯度正是由此得出的
交叉熵损失
对于标签$\mathbf{y}$可以使用与以前相同的表示形式,唯一的区别是现在用一个概率向量表示,而不是仅包含二元项的向量
使用交叉熵来定义损失
$$
\begin{align*}
l(\mathbf{y}, \hat{\mathbf{y}})
= -\sum_{j=1}^q y_j \log \hat y_j
= \log \sum_{k=1}^q \exp(o_k) - \sum_{j=1}^q y_j o_j
\end{align*}
$$
它是所有标签分布的预期损失值,是分类问题最常用的损失之一
从信息论看交叉熵
熵
信息论的核心思想是量化数据中的信息内容,该数值被称为分布的熵(entropy)
$$
H[P] = \sum_j - P(j) \log P(j).
$$
信息论的基本定理之一指出,为了对从分布$p$中随机抽取的数据进行编码,至少需要“$H[P]$纳特(nat)”对其进行编码
注意,这里的 “纳特”相当于比特(bit),但是对数底为$e$而非2,1纳特约为1.44比特
$$
\frac{1}{\log(2)} \approx 1.44
$$
信息量
如果一个数据流很容易预测,那它就很容易压缩
信息量小 = 可预测性强 = 可压缩性高
如果不能完全预测每一个事件,有时可能会感到“惊异”,克劳德·香农决定用信息量来量化这种惊异程度
$$
\log \frac{1}{P(j)} = -\log P(j)
$$
在观察一个事件$j$时赋予它主观概率$P(j)$,概率越低惊异会更大,该事件的信息量也就更大
当考虑所有可能事件时,信息量的期望就是熵
再看交叉熵
可以把交叉熵想象为“主观概率为$Q$的观察者在看到根据概率$P$生成的数据时的预期惊异”
当$P=Q$时,交叉熵达到最低,在这种情况下,从$P$到$Q$的交叉熵是$H(P, P)= H(P)$,没有额外的惊讶
可以从两方面来考虑交叉熵分类目标:
- 最大化观测数据的似然
- 最小化传达标签所需的惊异(压缩)
练习题
计算softmax交叉熵损失的二阶导数,并计算$\mathrm{softmax}(\mathbf{o})$给出的分布方差,并与上面计算的二阶导数匹配
对梯度再求一次导得到
$$
\frac{\partial^2 l}{\partial o_i \partial o_j}=\frac{\partial}{\partial o_j}\left(\hat y_i-y_i\right)=\frac{\partial \hat y_i}{\partial o_j}
$$
Softmax的导数公式是
$$
\frac{\partial \hat y_i}{\partial o_j}=\hat y_i\left(\delta_{i j}-\hat y_j\right)
$$
所以二阶导矩阵(Hessian)为
$$
H_{i j}=\hat y_i\left(\delta_{i j}-\hat y_j\right)
$$
即
$$
H=\operatorname{diag}(\hat{\mathbf{y}})-\hat{\mathbf{y}} \hat{\mathbf{y}}^{\top}
$$
对于一个类别分布(多项分布)的协方差
$$
\operatorname{Cov}[\hat{\mathbf{y}}]=\operatorname{diag}(\hat{\mathbf{y}})-\hat{\mathbf{y}} \hat{\mathbf{y}}^{\top}
$$
会发现这正好和上面的 Hessian 完全一样!
图像分类数据集
MNIST数据集(LeCun et al., 1998)是图像分类中广泛使用的数据集之一,但作为基准数据集过于简单,将使用类似但更复杂的Fashion-MNIST数据集 (Xiao et al., 2017)
Fashion-MNIST由10个类别的图像组成,每个类别由训练数据集中的6000张图像和测试数据集中的1000张图像组成,因此训练集和测试集分别包含60000和10000张图像
先导入一部分包
1 | import torch |
常用数据集
分类任务数据集(Image Classification)
| 数据集名称 | 用途 |
|---|---|
| MNIST | 手写数字识别,灰度图(28×28) |
| FashionMNIST | 服装分类任务,灰度图(28×28) |
| CIFAR10 | 10类彩色小图(32×32),经典视觉分类 |
| CIFAR100 | CIFAR10 的扩展(100 类) |
| ImageNet | 大规模分类基准,1000 类 |
| STL10 | 类似 CIFAR,但图像更高分辨率(96×96) |
| SVHN | 街景数字识别(彩色数字) |
| Caltech101 / 256 | 多种物体类别图像 |
读取数据集
可以通过框架中的内置函数将Fashion-MNIST数据集下载并读取到内存中
1 | trans = transforms.ToTensor() |
transforms.ToTensor():把一张PIL图片(NumPy数组)转换成张量(Tensor),并把像素值从[0, 255]映射到[0, 1]之间,图像的维度从(H, W, C)变为(C, H, W)
1 | mnist_train[0][0].shape # torch.Size([1, 28, 28]) |
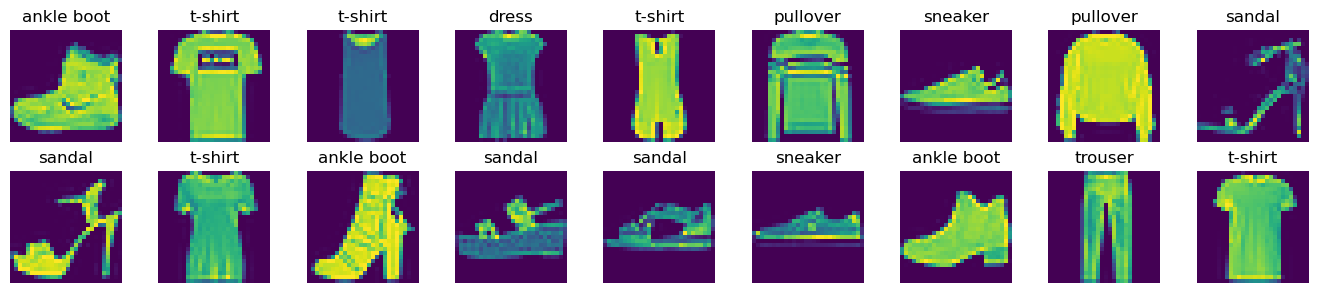
Fashion-MNIST中包含的10个类别,以下函数用于在数字标签索引及其文本名称之间进行转换
1 | def get_fashion_mnist_labels(labels): #@save |
现在可以创建一个函数来可视化这些样本
1 | def show_images(imgs, num_rows, num_cols, titles=None, scale=1.5): #@save |
1 | # iter() 把它变成迭代器 |
读取小批量
通过内置数据迭代器,可以随机打乱所有样本,并在每次迭代中读取一小批量数据,大小为batch_size
1 | batch_size = 256 |
利用之前定义的定时器类来计时
1 | timer = Timer() |
整合所有组件
定义load_data_fashion_mnist函数,用于获取和读取Fashion-MNIST数据集
这个函数返回训练集和验证集的数据迭代器
此外这个函数还接受一个可选参数resize,用来将图像大小调整为另一种形状
1 | def get_dataloader_workers(): #@save |
1 | train_iter, test_iter = load_data_fashion_mnist(32, resize=64) |
1 | torch.Size([32, 1, 64, 64]) torch.float32 torch.Size([32]) torch.int64 |
如果减少batch_size(如减少到1)是否会影响读取性能?
当然,会让 I/O 频率变高、CPU 多进程效率下降、GPU 并行利用率变差
1 | timer = Timer() |
softmax回归的底层实现
使用刚刚引入的Fashion-MNIST数据集,并设置数据迭代器的批量大小为256
1 | batch_size = 256 |
初始化模型参数
现在暂时只把每个像素位置看作一个特征,原始数据集中的每个样本都是$28 \times 28$的图像,展平每个图像看作长度为784的向量
在softmax回归中,输出与类别一样多,所以网络输出维度为10
权重构建为$784 \times 10$的矩阵,偏置将构成一个$1 \times 10$的行向量,将使用正态分布初始化权重,偏置初始化为0
1 | num_inputs = 784 |
定义softmax
当调用sum运算符时,可以指定保持在原始张量的轴数,而不折叠求和的维度
实现softmax由三个步骤组成:
- 对每个项求幂(使用
exp) - 对每一行求和(小批量中每个样本是一行),得到每个样本的规范化常数
- 将每一行除以其规范化常数,确保结果的和为1
1 | def softmax(X): |
对于任何随机输入,将每个元素变成一个非负数,并且依据概率原理,每行总和为1
虽然这在数学上看起来是正确的,但在代码实现中有点草率,矩阵中的非常大或非常小的元素可能造成数值上溢或下溢
因为计算机中并不是用“数学上的实数”,而是用浮点数,可表示范围有限,如果x很大或者很小,分子分母都可能出现inf,导致出现NaN,这对于训练神经网络是灾难
如何解决这个问题呢?
对 softmax 的每一行向量减去它的最大值,不影响结果,却能避免溢出
1 | def softmax(X): |
$$
\operatorname{softmax}\left(x_{i}\right)=\frac{e^{x_{i}}}{\sum_{j} e^{x_{j}}}=\frac{e^{x_{i}-\max (x)}}{\sum_{j} e^{x_{j}-\max (x)}}
$$
数值上完全等价,但避免了 exp(大数) 的爆炸
定义模型
神经网络要求输入是二维的 (batch_size, feature_dim)
将数据传递到模型之前,使用reshape函数将每张原始图像展平为向量
定义输入如何通过网络映射到输出
$$
\color{purple} {\hat{\mathbf{y}}} = \mathbf{X} \mathbf{w} + b
$$
1 | def net(X): |
定义损失函数
引入交叉熵损失函数,深度学习中最常见的损失函数,因为目前分类问题的数量远远超过回归问题的数量
1 | def cross_entropy(y_hat, y): |
这里也会出现一个定义问题,假如
y_hat(预测概率)非常接近 0,会因为浮点误差导致变成0,出现inf
可以给log加一个小常数避免数值溢出
1 | def cross_entropy(y_hat, y): |
这里用到多维索引,一次性指定所有维度的索引,不需要逐层访问
分类精度
给定预测概率分布y_hat,必须输出硬预测(hard prediction)时,通常选择预测概率最高的类,分类精度即正确预测数量与总预测数量之比
虽然直接优化精度可能很困难(因为精度的计算不可导),但精度通常是最关心的性能衡量标准
如果y_hat是矩阵,那么假定第二个维度存储每个类的预测分数,使用argmax获得每行中最大元素的索引来获得预测类别,然后将预测类别与真实y元素进行比较
结果是一个包含0(错)和1(对)的张量,最后求和会得到正确预测的数量
1 | def accuracy(y_hat, y): #@save |
1 | y_hat = torch.tensor([[0.1, 0.9, 0.0], [0.8, 0.1, 0.1], [0.3, 0.3, 0.4]]) |
对于任意数据迭代器data_iter可访问的数据集,可以评估在任意模型net的精度
1 | class Accumulator: #@save |
优化算法
对于优化函数,使用之前定义的小批量随机梯度下降来优化模型的损失函数,设置学习率为0.1
1 | def sgd(params, lr, batch_size): #@save |
训练
首先定义一个函数来训练一个迭代周期,updater是更新模型参数的常用函数,它接受批量大小作为参数
1 | def train_epoch_ch3(net, train_iter, loss, updater): #@save |
定义一个在动画中绘制数据的类Animator
1 | class Animator: |
实现一个训练函数,它会在train_iter访问到的训练数据集上训练一个模型net
该训练函数将会运行多个迭代周期,在每个迭代周期结束时,利用test_iter访问到的测试数据集对模型进行评估,最后利用Animator类来可视化训练过程
1 | def train_ch3(net, train_iter, test_iter, loss, num_epochs, updater): #@save |
启动代码部分
1 | batch_size = 256 |
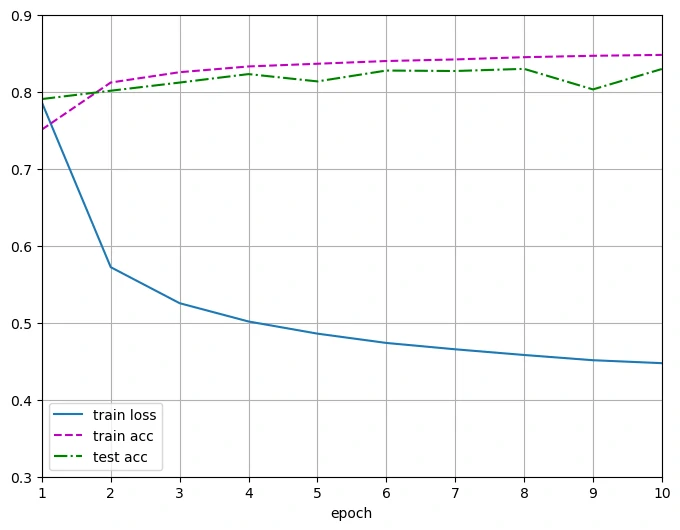
输出结果
1 | Final loss 0.448, train acc 0.847, test acc 0.830 |
预测
现在训练已经完成,模型已经准备好对图像进行分类预测
给定一系列图像将比较它们的实际标签(文本输出的第一行)和模型预测(文本输出的第二行)
1 | def predict_ch3(net, test_iter, n=6): #@save |

训练softmax回归循环模型与训练线性回归模型非常相似:先读取数据,再定义模型和损失函数,然后使用优化算法训练模型,大多数常见的深度学习模型都有类似的训练过程
练习题
返回概率最大的分类标签总是最优解吗?例如,医疗诊断场景下可以这样做吗?
softmax 只考虑“哪个更可能”,却不知道“这个决策带来的后果”,所以这些领域往往要引入阈值决策(decision threshold),而不是简单地取
argmax假设使用softmax回归来预测下一个单词,可选取的单词数目过多可能会带来哪些问题?
问题类别 产生原因 后果 解决方法 计算量爆炸 词表太大,每次都要算所有词的 exp 训练极慢 Hierarchical Softmax, Sampled Softmax 数值不稳定 exp(大数) 溢出, exp(小数) 下溢 NaN、梯度消失 减最大值、Log-Softmax 内存消耗高 最后一层参数量随词表线性增长 显存不足 参数分片、低秩分解、稀疏更新 模型不平衡 高频词梯度主导 泛化差 采样修正、词频平衡
softmax回归的简洁实现
通过深度学习框架的高级API也能更方便地实现softmax回归模型,继续使用Fashion-MNIST数据集,并保持批量大小为256
1 | batch_size = 256 |
初始化模型参数
softmax回归的输出层是一个全连接层,为了实现模型,只需在Sequential中添加一个带有10个输出的全连接层,仍然以均值0和标准差0.01随机初始化权重
1 | # PyTorch不会隐式地调整输入的形状 |
softmax的实现
在底层实现时考虑到可以从所有$o_k$中减去$\max(o_k)$避免上溢,这是可行的,但是可能$o_j - \max(o_k)$具有较大的负值,$\exp(o_j - \max(o_k))$可能会出现下溢的情况,使得$\log(\hat y_j)$为-inf
通过将softmax和交叉熵结合在一起,可以避免反向传播过程中可能会困扰的数值稳定性问题
$$
\begin{split}\begin{aligned}
\log{(\hat y_j)} & = \log\left( \frac{\exp(o_j - \max(o_k))}{\sum_k \exp(o_k - \max(o_k))}\right) \\
& = \log{(\exp(o_j - \max(o_k)))}-\log{\left( \sum_k \exp(o_k - \max(o_k)) \right)} \\
& = o_j - \max(o_k) -\log{\left( \sum_k \exp(o_k - \max(o_k)) \right)}.
\end{aligned}\end{split}
$$
这样就没有将softmax概率传递到损失函数中,而是在交叉熵损失函数中传递未规范化的预测,在同一过程中同时得到 softmax 和它的对数,以避免数值溢出并提高计算效率
1 | loss = nn.CrossEntropyLoss(reduction='none') |
优化算法
使用学习率为0.1的小批量随机梯度下降作为优化算法
1 | trainer = torch.optim.SGD(net.parameters(), lr=0.1) |
训练
训练函数仍用之前定义的
1 | num_epochs = 10 |
和以前一样,这个算法使结果收敛到一个相当高的精度,而且这次的代码比之前更精简了
1 | Final loss 0.448, train acc 0.849, test acc 0.811 |
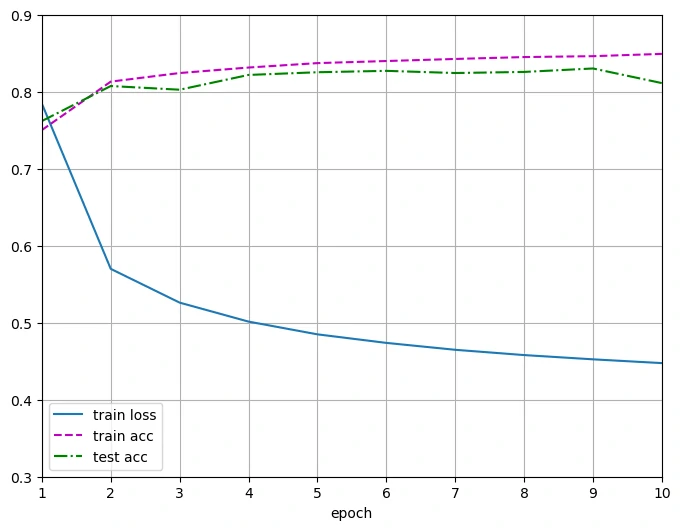
在图上会发现一个现象,第10轮的精度比第9轮的下降了,意味着模型已经开始拟合噪声,而非通用特征,也就是常说的过拟合(overfitting)
在这个例子中Fashion-MNIST并不是很复杂,使用的模型参数却有784个,网络太过复杂化,就容易陷入过拟合
过拟合的解决在多层感知机部分讲解

.webp)